Project
SEED Lab Robot Project
Fall 2025 • School Project
Co-developed an autonomous maze-navigating robot featuring real-time computer vision with OpenCV, multithreaded processing pipelines, and precise embedded motor control.
Skills Used
MATLAB Simulink Python Arduino
Details
- Co-developed an autonomous maze robot in a 4-person team by combining onboard vision, embedded motor control, and inter-device communication, helping deliver the second-fastest final run in the class.
- Built the Python/OpenCV perception stack using ArUco marker tracking to estimate heading and distance in real time, giving the robot reliable position cues for turn timing and corridor alignment.
- Designed a multithreaded 640x480 vision pipeline with HSV-based color segmentation so image capture, marker detection, and navigation decisions could run concurrently without blocking control updates.
- Integrated the vision computer with an Arduino motor controller over I2C, streaming navigation telemetry while driving a live RGB LCD status display to improve debugging and on-course tuning.
Files
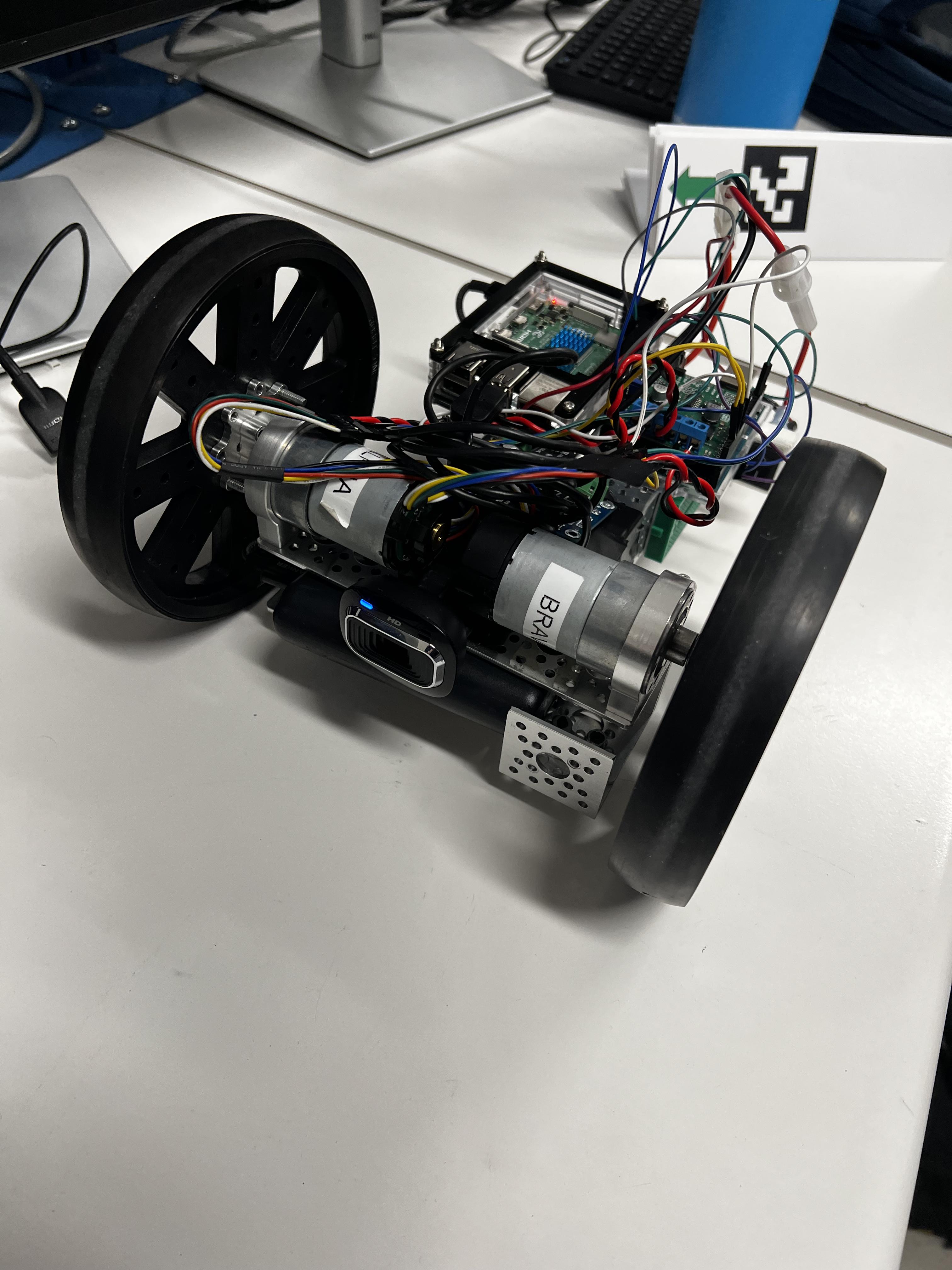
Front of Robot
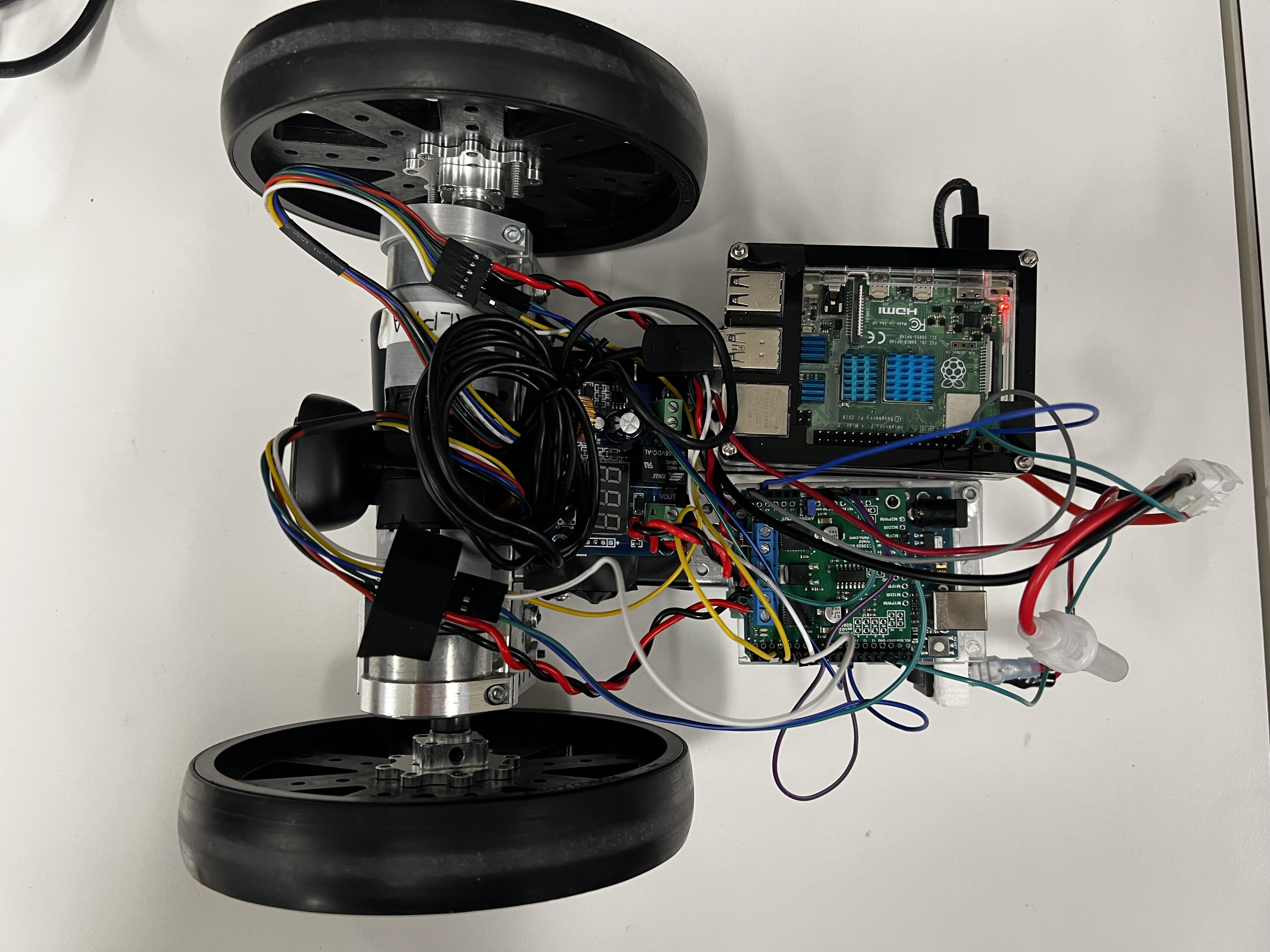
Top of Robot